Bosszankodsz, mert nem FIX a pozíció?
A TÉNY, amin nem változtathatunk:
A kutatók számításai szerint a Nap 2019 decemberében ért el egy aktivitási minimumot, amely alapján az új, nagyjából 11 éven át tartó ciklus során a legerősebb aktivitású időszak 2024 novembere és 2026 márciusa között várható. Az eddigi megfigyelések alapján ez a ciklus akár 50%-kal erősebb is lehet, mint az előző volt.
A https://monitor.gnssnet.hu és a https://corrigo.hu/network lapokon (ez utóbbinál az egyik referencia állomás ikonra kattintva, majd a lap alsó részét megjelenítve) látható az ionoszféra aktivitásának a GNSS hálózati észleléseket terhelő hatása, számszerűen és grafikonon is szemléltetve. Amikor az érték a gnssnet-nél nagyobb mint 5 cm, akkor számíthatunk az alábbi következményekre.
A KÖVETKEZMÉNYEK amire számíthatunk, és amit már több mint fél éve tapasztalunk:
A nappali órákban (többnyire 9-15 óra között) és főleg a téli hónapokban GNSS vevőnk hálózati rover üzemmódban nehezen éri el az RTK FIX minőségű pozíciót, és ha el is éri, a kiszámított pozíció a kijelzőn megjelenő kis középhiba ellenére pontatlan, akár 10-150 cm hibát is tartalmazhat. Ez utóbbi esetet nevezzük álfixnek.
2023 február 1 és 10 között többféle gyártmányú GNSS vevővel végzett tesztméréseim tapasztalatai:
- Akkor a legnehezebb a fix minőségű pozíciót elérni, amikor a választott korrekció szolgáltató hálózatának a mérési helyszínhez legközelebbi referencia állomása is nagyon távol van. A Lechner (gnssnet.hu) hálózata ugyan sűrűbb (közelebb vannak egymáshoz a referencia állomások, mint a Corrigo-nál), mégis ezt használva néha már 20-25 km távolság esetén sem lesz fix a pozíció. A Corrigo hálózatát használva talán kb. 30 km-nél lehet a határ.
- Sajnos vannak olyan területek az országban, amelyek esetében a Lechner és a Corrigo legközelebbi referencia állomása is a fent megadott értéken túl van. Ezeken a helyeken van esély arra, hogy egyik korrekció szolgáltatóval sem lesz fix pozíció. Néhány példa: Tevel (Tolna), Lőrinci (Heves), Soltvadkert (Bács), Nagytőke (Csongrád), Tiszacsege, stb.
- Ha a vevő a legközelebbi referenciaállomástól távol, a Lechnertől vett korrekcióval eléri a fix pozíciót, akkor az álfix valószínűsége viszonylag kicsi.
- Ha a vevő a legközelebbi ref. állomástól 30 km-nél távolabb, a Corrigo-tól vett korrekcióval eléri a fix pozíciót, akkor az álfix valószínűsége nagyobb, mint a Lechnertől vett korrekció esetében.
- Néha a vevő a Lebegő minőségű pozíció ellenére már a fix minőségnél megszokott 1-3 cm alatti megbízhatósági értékeket (RMS, SDV, szigma, stb) produkálja, mégsem lesz fix a pozíció. Ez egyértelműen a magas ionoszféra aktivitás hatására utal. Ekkor az Y és X koordináta értéke gyakran 1-5 cm-re van a valóságostól, de a magasságban lehet több dm eltérés is. Ennek ellenére nem ajánlatos a lebegő minőségű pozíciót tárolni, mert ez nem minden esetben van így.
JAVASLATOK amelyek segíthetnek
- Ha csak kevés időt töltenénk GNSS méréssel (1-2 óra), akkor azt fejezzük be reggel 9 óra előtt, vagy kezdjük 15 óra után.
- Annak ellenére, hogy ez nem mindenhol segít (lásd fentebb) jó, ha van Corrigo előfizetésünk is a Lechner mellett (vagy fordítva). Ha az egyik rendszerrel nem kapunk fixet, a másikkal nagyobb valószínűséggel lehet fix.
- Az aktuálisan beállított korrekció szolgáltató mount pointjai-t váltogassuk. A Lechnernél az SGO_PRS3.2, illetve a többi 3.2-re végződő az elsődlegesen ajánlott, de előfordulhat, hogy az egyik 3.1-re végződő mount pointtal lesz fix. Az SGO_RTK-val kezdődő mount pointok akkor lehetnek eredményesebbek, ha a legközelebbi Lechner referenciaállomás 10-15 km-en belül van. A Corrigo-nál az elsődlegesen ajánlott mount point az AUTOSWITCH-MSM, de ezen kívül érdemes próbálkozni a lista utolsó 2 elemével is.
- Emeljük a magassági kitakarást a szokásos 10 fokról 15, 20, 25, vagy akár 30 fokra.
- Zárjuk ki a használandó rendszerek közül a Glonass-t. A Corrigo-nál ezt a VRS_MSM_G-E-C mount point választásával is el tudjuk érni.
- A legbiztosabb megoldás, ha nem hálózati korrekciót használunk, hanem saját bázist, maximum 10 km távolságra a rovertől. Természetesen a bázis pozíciójának meghatározásához (ha nincs ismert alappont a közelben) hálózati RTK korrekcióra lesz szükség, de ez mindössze egyetlen maximum 2-3 percig tartó mérés, amit ajánlott de.9 óra előtt elvégezni (és ha lehet 2x egymás után, köztük újrainicializálással).
A fent felsorolt megoldási javaslatok a vevő (helyesebben az adatgyűjtő-vezérlő szoftver) kezelésének megfelelő szintű ismeretét, némi türelmet és kitartást igényelnek. A lechneres mountpoint váltogatás hasznosságának megértéséhez a következő 4 dolgot érdemes észben tartani.
- A 3.1-re végződő mount pointokról akkor is csak GPS+GLO korrekciót kap a vevő, ha a mérési terület közelében az összes referencia állomás GPS+GLO+GAL+BDU képességű.
- A 3.2-re végződő mount pointokról csak akkor kap mind a 4 rendszerre korrekciót a vevő, ha a legközelebbi referenciaállomás 4 rendszerre bővített.
- Az SGO_RTK-val kezdődő mount pointok esetében nem hálózati kiegyenlítéssel képzett korrekciót kap a rover, mint az SGO_PRS-ek esetében, hanem a legközelebbi referencia állomás által előállított korrekciót.
- Akkor is a legközelebbi referencia állomáson képzett korrekciót kapja a vevő, ha PRS-es a mount point, viszont a legközelebbi referencia állomás 4.3 km-en belül van. Normális esetben a PRS mount pointok használatát javasoljuk inkább, viszont magas iono. aktivitás esetén, és rövid bázistávolságon (ez alatt talán 10 km-t kell értenünk) hatékonyabb lehet a 3. pontban említett megoldás. Ugyanezért szinte biztosan jó megoldás a probléma leküzdésére, ha saját bázist alkalmazunk.
Amit KÖTELEZŐ megtenni
A fentiekből következik, hogy magas ionoszféra hiba esetén nem lehetünk biztosak abban, hogy a vevő által meghatározott pozíció tényleg annyira pontos-e, mint amit a vevő jelez, vagy sem. Ezért – bármilyen sokáig vártunk is a fixre -, vagy rögtön az első pont bemérése és tárolása után végezzen újra inicializálást (5 másodpercig állítsa fejtetőre a vevőt, az antenna forduljon a talaj felé), majd nézze meg az első ponton, hogy az új fix ugyanazt a pozíciót adja-e, vagy a mérés végén végezzen újra inicializálást, és amint fix lesz mérje újra a pontok minimum 5%-át, szétszórtan a területen.
Amit TILOS, de minimum nagyon nem ajánlott tenni
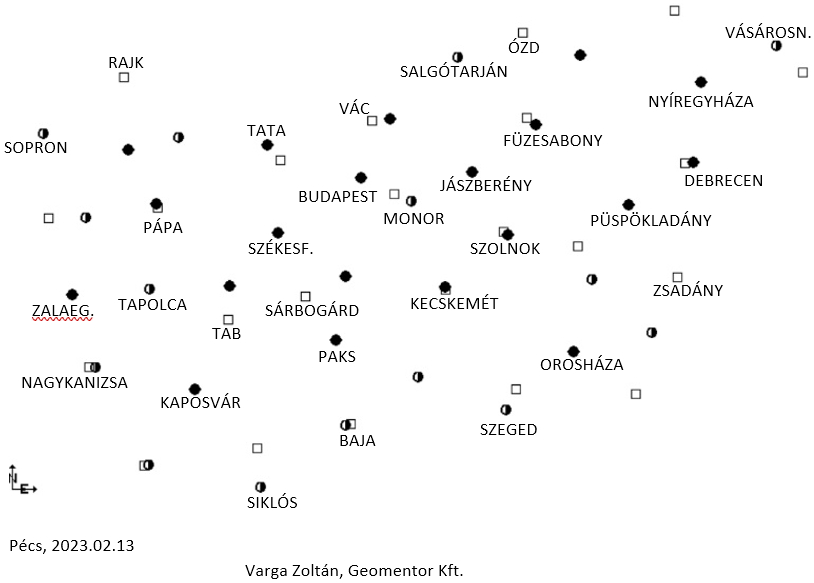
Soha ne várjon 3 percnél hosszabb ideig a fix pozícióra. Ha már több mint 3 perce lebegő a minőség, akkor végezzen újra inicializálást (lásd fentebb). Ha mégis sokkal több mint 3 perc várakozás után lett fix, akkor a legfontosabb 4-5 pont bemérése után végezzen újra inicializálást, és visszamérést az 1. pontra. Az alábbi térkép a Corrigo és a Lechner jelenlegi, Magyarország területén telepített referencia állomásainak elhelyezkedését mutatja be.
Jelmagyarázat:
- Teljes kör: Lechner
- Félkör: Lechner, csak GPS+Glonass (ha ilyen a munkaterülethez legközelebbi ref. állomás, akkor a 3.2-re végződő mount pointról is csak GPS+GLONASS korrekciót kap a vevő)
- Négyzet: Corrigo
- A hozzászóláshoz regisztráció és bejelentkezés szükséges
Nagyon szépen köszönöm, a Te
Nagyon szépen köszönöm, a Te több évtizedes segítséged sok bajból kihúzott, átsegített. Te vagy ma is számomra a biztos infó pont, Aki ezt a levelet 1 nagy "nyelvvel " minősítené, annak figyelmét felhívom a sok éves tapasztalásomra, valamint ímmár érdekeimet sem befolyásolná.
Tehát: ismét kösz szépen, Zoli !
Üdv:
Szivós András Péter (c) ATLASZ Földmérő Kft.
Hello! Utófeldolgozással nem
Hello!
Utófeldolgozással nem lehet az adatokat korrigálni?
Üdv:
Kristóf András
Kedves András, Azt nem
Kedves András,
Azt nem vizsgáltuk (én legalábbis soha), hogy az utófeldolgozás eredményét mennyire befolyásolja a magas ionoszféra aktivitás. Másfelől nem értem, hogy pontosan mire gondolsz. Ha kint a terepen RTK-val bemértél pontokat, akkor azt utófeldolgozással esetleg újból ki lehet számítani, de csak akkor, ha RTK mérés közben is tárolta a vevő a nyers mérési adatokat. Talán működik a dolog így is egyes vevők esetében, de a legtöbbnél szerintem csak az egyik legetőséget választhatod a kettő közül. Tehát vagy RTK mődban tárolsz pozíciót, vagy PPK módban nyers észlelést. Ez utóbbi esetben (is) szükség lesz egy bázis vevőre, amely minimum 1 mp sűrűséggel valahol a rover közelében (lehetőleg 10 km-en belül) szintén nyers adatokat tárol egy ismert koordinátájú ponton. A terepi munka végén pedig egy utófeldolgozó szoftverrel ki kell számítanod a koordinátákat. De ha már van egy másik vevőd, amit utófeldolgozáshoz bázisként használnál, akkor ésszerűbb ezt a bázist RTK bázisként használni (ehhez vagy URH rádió kell, vagy GSM kapcsolat egy szerverrel), és sokkal egyszerűbben kapsz megbízható pozíciót magas ionoszféra aktivitás idején is. A mai vevők többsége tartalmaz beépített rádiót, és az internetes szerver szolgáltatást is sok gyártó biztosítja. Régi vevőknél is megoldható talán. Szóval szerintem felejtsük el az utófeldolgozást.
Varga Z.